반응형
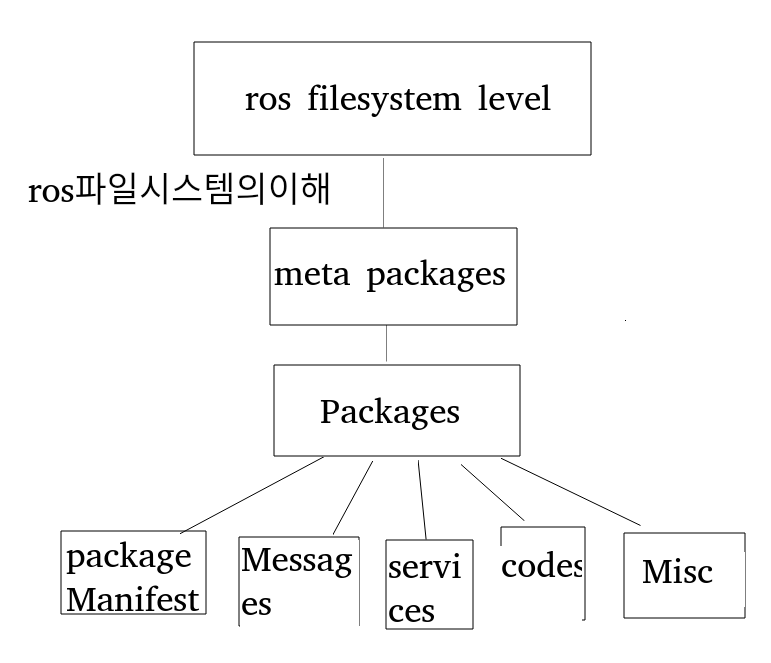
1. ROS 파일 시스템 레벨
ros 파일은 위의 다이어그램처럼 특정 방식으로 하드 디스크에 구성됩니다.
위의 사진들에 해당하는 내용들을 나열해 보겠습니다.
1)Packages:
ros package는 ros 소프트웨어의 핵심 요소입니다.
패키지는 하나 이상의 노드,라이브러리 등을 포함하고 있고 ROS 소프트 웨어 에서 최소 빌드 요소입니다.
추가:ros package를 만드는 명령어는 catkin_create_pkg 패키지명 입니다.
2)meta packages:
메타 패키지는 여러 개의 패키지를 묶어놓은 것을 말합니다.
3)package Manifest:
패키지 매니페스트 파일은 패키지 내부 정보를 포함하고 패키지 디렉터리 내에 존재합니다.
package.xml 파일은 매니페스트 파일입니다.
4)Messages:
msg 디렉터리에서 사용자 정의 메시지를 정의 합니다. 확장자는 .msg 입니다.
5)Services:
응답 및 요청 데이터. 확장자는 .srv입니다.
6)Repositories:
대부분의 ROS 패키지는 VCS를 사용해 유지 관리됩니다. 파일로 관리해주는 역할을 합니다.(저장소 역할)
ROS 파일시스템에 대한 각 블록들에 대한 설명을 알아봤습니다.
해당 내용은 "3/e ROS 로보틱스 프로그래밍" 책을 참조했습니다.
반응형
'개발일지' 카테고리의 다른 글
| ROS 마스터, ROS master는 무엇일까? ROS master 명령어에 대해서도 알아보자 (0) | 2023.01.11 |
|---|---|
| ROS node/ROS 노드란 무엇일까? ros책 (0) | 2023.01.11 |
| 프로세스란 무엇일까? 프로그램이란? (0) | 2023.01.10 |
| IPv4이란? 인터넷 프로토콜 IPv4는 무엇일까? 패킷교환이란? (1) | 2023.01.07 |
| #2 ROS 개발 환경 구축하기 리눅스18.04 ros버전별 LTS, 환경 변수 설정하기 (0) | 2023.01.05 |




댓글