먼저 진행하기 전 버전별 설치해야 하는 LTS를 알아보도록 하겠습니다.
2020.05.23 - Noetic Ninjemys (LTS)
2018.05.23 - Melodic Morenia (LTS)
2017.05.23 - Lunar Loggerhead
2016.05.23 - Kinetic Kame (LTS)
2015.05.23 - Jade Turtle
2014.07.22 - Indigo lgloo (LTS) 2014년에 ROS가 제일 흥했다고 합니다. 그렇기 때문에 관련 라이브러리들도 많다고 합니다.
2013.09.04 - Hydro Medusa
2012.12.31 - Groovy Galapagos
2012.04.23 - Fuerte Turtle
2011.08.30 - Electric Emys
2010.08.02 - C Turtle
2010.03.02 - Box Turtle
2010.01.22 - ROS 1.0
등등 이 있습니다. 해당 버전에 맞게 LTS를 설치하셔야 실행이 가능합니다.
1.환경 변수 설정하기
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrcresorce했을 때 오류가 생기면 source ~/.bashrc를 해주시면 됩니다.
2. 패키지 빌드를 위한 의존성 설정하기
위의 링크를 먼저 시작해서 지금까지 잘 따라 오셨으면 ROS 패키지 실행을 위한 것들을 설치 완료하셨을 것입니다.
이제 ROS 패키지들을 빌드하기 위한 의존성을 위해 명령어를 실행하시면 됩니다.
sudo apt install python-rosdep ptyhon-rosinstall python-rosinstall-generator python-wstool build-essential패키지 빌드를 위한 의존성 설치를 하셨다면 rosdep을 초기화 해줍시다.
sudo apt install python-rosdep
sudo rosdep init
rosdep update업데이트까지 해줍시다!
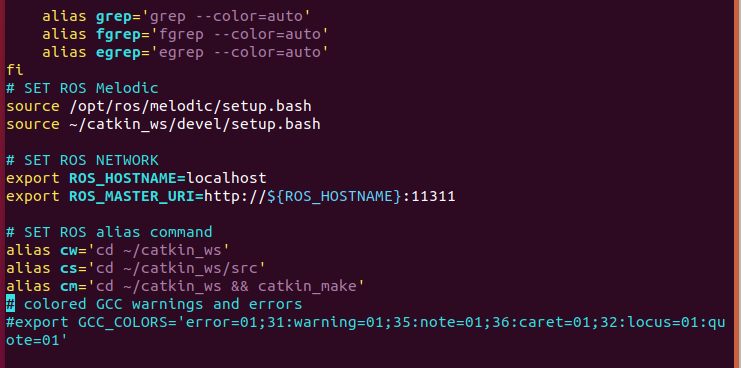
그 다음 ROS 개발 환경을 vi로 bashrc를 수정해줍시다.
해당 내용이 없다면 .bashrc에 추가해주세요.
마지막으로 작업 폴더 생성 및 초기화 그리고 패키지 빌드 환경파일 호출에 대해 알아보도록 하겠습니다.
작업 파일 생성 및 초기화는 파일을 만들기 위해서는 mkdir을 적어주셔야 합니다.
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace
//패키지 빌드해줍시다.
$ cd ~/catkin_ws/
$ catkin_make여기서 환경파일 호출 해봅시다. 아래 코드를 작성해주세요!
$ source ~/catkin_ws/devel/setup.bash테스트 하기 위해서는 터미널 창에 roscore를 해주세요. 만약 에러가 난다면 환경 변수를 제대로 설정하지 못한 것입니다.
'개발일지' 카테고리의 다른 글
| 프로세스란 무엇일까? 프로그램이란? (0) | 2023.01.10 |
|---|---|
| IPv4이란? 인터넷 프로토콜 IPv4는 무엇일까? 패킷교환이란? (1) | 2023.01.07 |
| #1 ROS 개발 환경 구축하기 리눅스18.04 ros 설치하기 (0) | 2023.01.05 |
| #1 매직미러 MagicMirror 설치하는 방법 매직미러 실행이 안 됩니다. 매직미러 실행하는 방법! (1) | 2022.12.30 |
| [우분투] 리눅스 윈도우 복사 붙여넣기 하는 방법은? (0) | 2022.12.30 |


댓글