반응형
1.SLAM이란?
SLAM은 Simultaneous localization and mapping으로 임의 공간에서 이동하면서 주변을 탐색하는 로봇이 그 공간의 위치와 지도를 추정하는 문제를 말합니다. SLAM은 LiDAR 센싱을 통해 현재 위치에 대한 지도를 만들수도 있습니다.
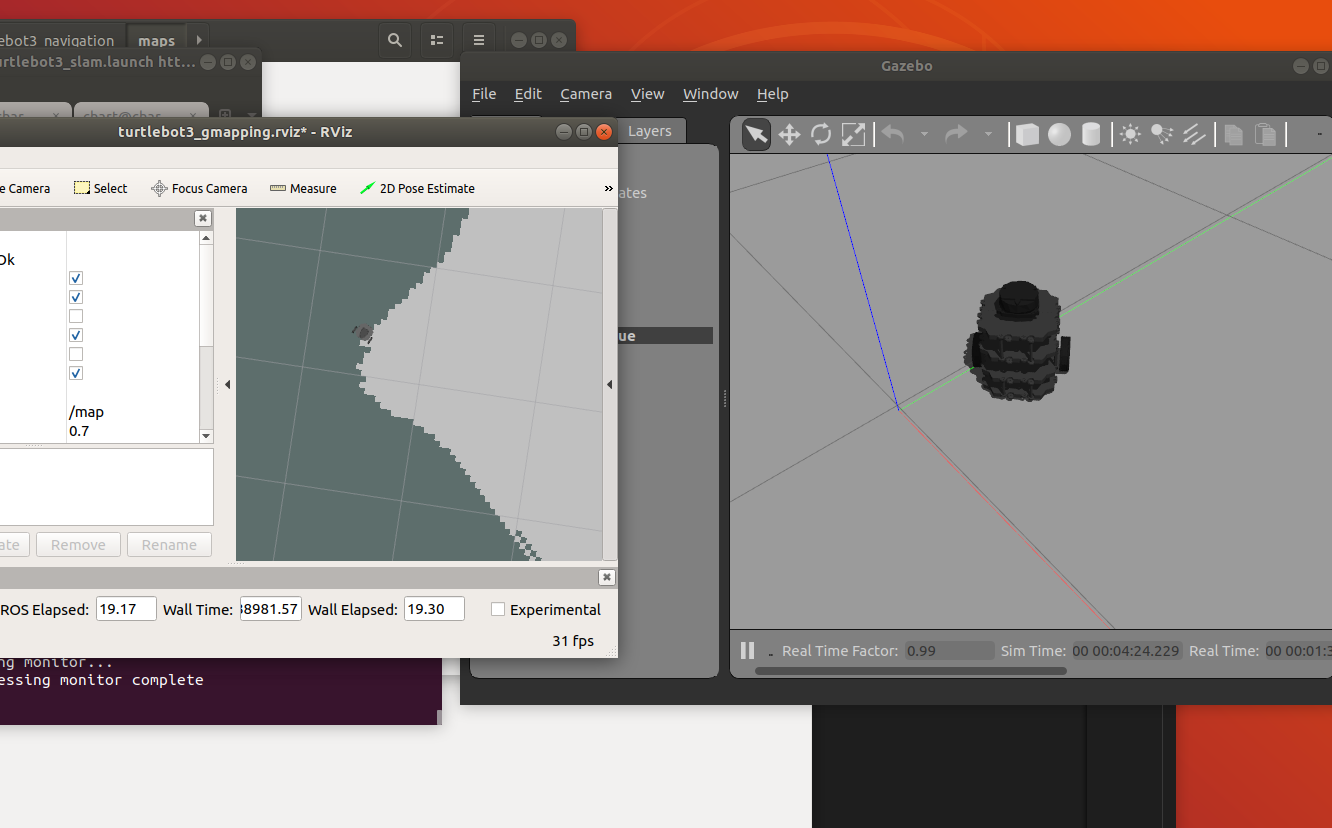
현재 위에 보이시는 사진은 왼쪽이 gmapping을 사용한 rviz화면이고 오른쪽은 gazebo 가상의 공간입니다.
slam.launch 파일을 실행시켰기 때문에 rviz에서 현재 위치에 대한 지도를 그릴 수 있습니다.
LiDAR 센서의 SLAM 기술을 통해 MAP을 그려서 이 맵을 저장한 뒤 네비게이션 기술로 확장이 가능합니다.
즉, SLAM(동시적 위치 추정 및 지도작성)은 자율주행 차량에 많이 사용이 되며 알고리즘을 통해 차량은 미지의 환경에 대한 지도를 작성하고 이 지도로 자율주행이 가능해집니다. 그려진 지도는 경로 계획과 장애물 회피 등의 작업에 수행되고 있으며 현재 컴퓨터 처리 속도가 빨라진 지금 시점에서 카메라와 레이저 거리 측정기 등을 통해 SLAM의 역할은 더 커지고 있습니다.
저는 gmapping으로 그렸는데 맵을 그릴 때 다양한 방법들이 존재합니다.
방법들로는 Gmapping, Cartographer, Hector, Karto, Frontier Exploration이 있습니다.
해당 내용은 "3/e ROS 로보틱스 프로그래밍"책을 보고 공부했습니다.
반응형
'개발일지' 카테고리의 다른 글
| 인공지능 수학, 지수 함수, 거듭 제곱근이란 무엇인가? 간단하게 알아보자. (0) | 2023.02.15 |
|---|---|
| 변수, 상수, 함수란 무엇인가요? 코딩할 때 기본 상식! variable,constant,function이란? (0) | 2023.01.22 |
| ROS 마스터, ROS master는 무엇일까? ROS master 명령어에 대해서도 알아보자 (0) | 2023.01.11 |
| ROS node/ROS 노드란 무엇일까? ros책 (0) | 2023.01.11 |
| ROS 파일 시스템 레벨 이해하기 ros 파일 시스템이란? (0) | 2023.01.11 |



댓글